本算法用于图像坐标与实际坐标之间的转换,与其他终端设备(比如机器人等)建立对应的坐标关系。
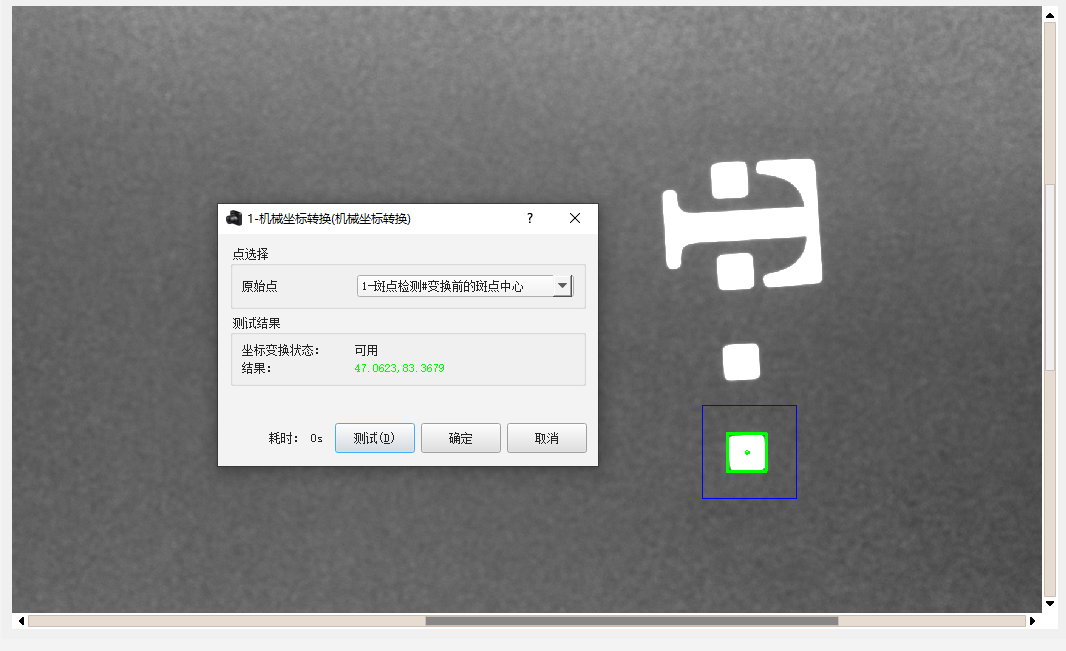
使用算法之前需先将工具里的相机坐标转换参数设定(参考2.2.9章节)。 参数设置位置如下图所示:
如上图原始点的坐标为:684,1865 转换关系结果为:47.0623,83.3679
4-1机械坐标转换; 4-2与其他终端设备建立对应关系。
← 曲线拟合 彩色转灰 →